在實際運用中,如果你想用一臺核磁共振(MRI)掃描儀來創造磁場,那么無論這個磁場的梯度如何,MRI 觸及范圍的所有東西都會受到影響,因此如果你想讓兩個微型機器人同時做不同的事,幾乎是天方夜譚。
控制機器人在人體內的運動有兩種辦法:試著打造一種復雜的自帶推進和導航的微型機器人潛水艇(不過這類機器人很難做),或是打造響應磁場的小不點兒機器人(利用大磁鐵從外部控制機器人的運動)。后一種方法要簡單得多,不過有一個主要的不足:難以控制多個微型機器人。
問題在于:磁場因為是場,因此不易局限在某個特定區域。實際上,如果你在使用諸如一臺臨床 MRI 掃描儀來創造磁場,那么,無論磁場梯度如何,都會影響到 MRI 內部的所有東西,無論是單個微型機器人還是一群機器人。如果你想讓兩個不同的機器人做不同的事情,對不起,那就不走運了。
一個有希望的潛在解決方式就是讓每個機器人彼此輕微差異化,這樣,持續的控制輸入就能對每個機器人產生并不一致的影響。不過,對于同質機器人(homogenous robots)來說,就要難得多。昨天,發表在 Science Robotics 上的一篇論文(來自德國漢堡的飛利浦研究院,Philips Research in Germany)介紹了一種技術,可以利用磁場選擇性地驅動單個機器人,或者這個機器人的某個組件,即使這些機器人都是同一材質制作的,并位于同一磁場中。
這是這一技術的運作原理:設備中的整體磁場中有一個洞,也叫自由場點(a free field point,FFP),也是多個磁場(每個磁場都是有獨立線圈生成的)相遇的地方。在 FFP 里面,磁場梯度很低,沒辦法協助你移動物體,不過,卻能幫助你不移動物體,因為你可以在適當的地方,通過調大磁場梯度,「鎖住」不在 FFP 中的任何東西。然后,采用一個溫和的旋轉磁場,它可以旋轉 FFP 中任何東西而不會下鎖。通過來回移動 FFP,你就可以選擇要鎖住的東西以及要自由轉動的東西。
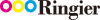
在這一案例中,「鎖」是一個利用磁場而一邊傾斜的螺旋體(screws),這樣它們就不能旋轉,而 FFP 是零度傾斜區域,亦即螺旋體可以自由旋轉。這一研究采用的硬件可以單個驅動螺旋體,而且這些螺旋體的間距可以低至 3 毫米左右。
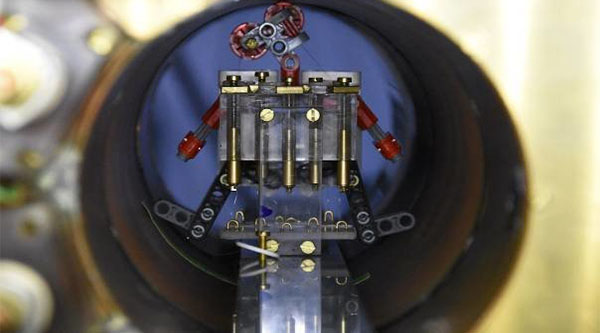
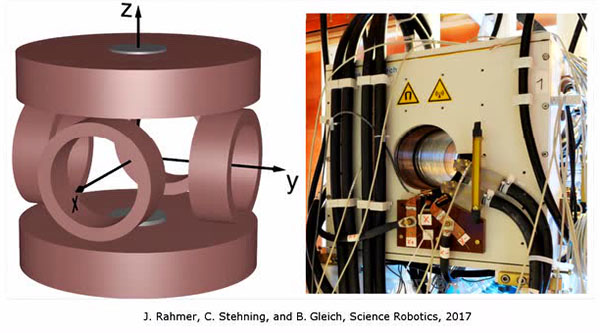
由磁場生成器(左)的圖解可見有三套直角線圈,在 z 方向(灰色)有一個鐵質內核。磁場生成器(中)有一個直徑 12 厘米的鉆孔。xy 平面(右)上理想磁場中心有一個 0 點,也就是自由場點(FFP),白色的箭頭代表局部磁場向量。
研究人員建議了一大堆不同的辦法來讓這一技術發揮實際作用:
有一類應用是以幾個分別加以控制的螺旋體驅動機制為基礎的。在整形外科中,可用于移植,被移植部分的形狀能夠根據恢復過程發生變化。在諸如下肢增長或早發性脊柱側凸等案例應用中,基于幾個可控旋轉體機制或為可延伸假肢或增長棒提供更高靈活性。另外,這一辦法能夠用于微流體中,其中,可以想象一種簡單微型磁泵以及閥門,無需電力或機械連接,即可單獨進行驅動。
另一類使用情況與用于局部治療實現的簡單微型機器有關,比如遙控一個可注射磁性微型藥丸釋放藥物。遙控可切換放射性種子是一類特殊案例。可切換開關的機器人種子(Switchable seeds)能讓資源的使用有更長的半衰期或更高的劑量率,因為達到所需的劑量后,放射性就可以被關閉。除此之外,最終距離健康組織或敏感器官太近的移動種子可以被關閉。
使用帶槽的螺旋盾,定向種子的遠程調節方式可以被建立。這可能會讓醫療領域中的精確用藥和組織維護技術有進一步的提升。另外,我們證明了磁操縱可以達到微米級別的精確性。通過導管,我們可以把種子帶入腫瘤和血栓的位置,完成任務后從血管中排出。在成像定位后,只有到達腫瘤位置的種子會被遠程激活。
論文題目:相同的螺旋微機器的空間選擇性的遠程磁致動(Spatially Selective Remote Magnetic Actuation of Identical Helical Micromachines)
作者:J. Rahmer、B. Gleich 和 C. Stehning
 供需大廳
供需大廳
 登錄/注冊
登錄/注冊 供應商登錄
供應商登錄